Koopman-inspired model
Visuo-dexterity through behavioral dynamics
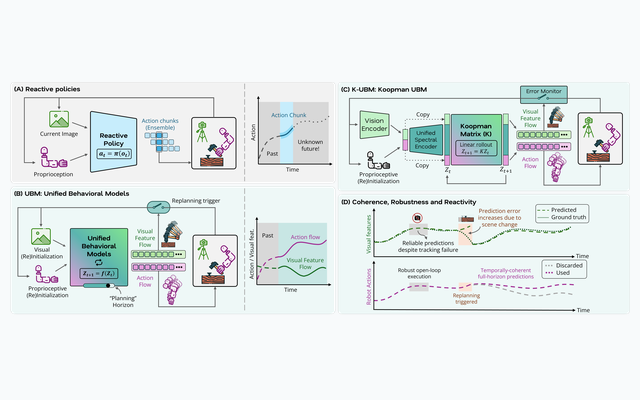
A Koopman-inspired visuo-dexterity model rolls out structured visual-action dynamics for temporally coherent manipulation.
For unanticipated disturbances, the behavioral dynamics model enables event-triggered replanning. We call it behavioral dynamics because it jointly predicts the coupled evolution of robot actions and object motions, with object motion parameterized by the object flow points. At runtime, it compares predicted and observed visual object flow; when their discrepancy exceeds a threshold, it generates a new, coherent action trajectory—balancing smooth execution with immediate reactivity, without tuning action chunks or collecting failure-recovery demonstrations.